Monte Carlo Tree Search Summary
Vanilla MCTS
http://www.incompleteideas.net/609%20dropbox/other%20readings%20and%20resources/MCTS-survey.pdf
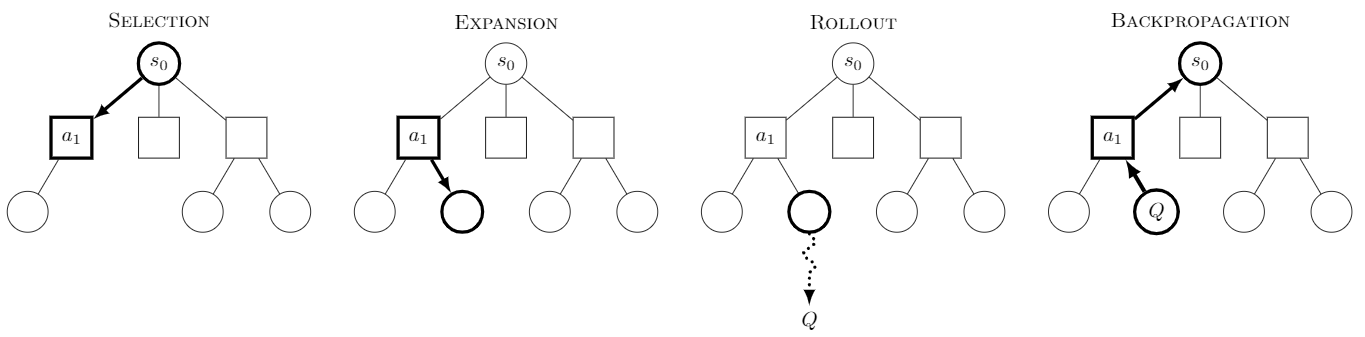
Searching Process
Starting from $S_0$ :
Selection:
Two statistic information:
- Visit count $N(V)$
- Win count $Q(V)$
Selection the possible action by Upper Confidence Bound for Tree (UCT): $$ UTC(v’) = \frac{Q(V’)}{N(V’)}+c\sqrt{\frac{InN(V)}{N(V’)}} $$
Until the most urgent expandable node is reached. A Expandable Node is the node that has one or mode child node haven’t been explored.
- Expansion:
- Adding the child node to the current node
- Rollout:
- Start from the current leaf node, taking a random sequence of actions to play the game until reaching to the end.
- Back-propogation:
- Backup the simulation result through the selected nodes to update their statistics
Note:
- The UCT score could be treated as two components: The exploitation part and the exploration part
- In exploitation part: $Q(v)$ is the rewards of all play out that pass the node $v$ , $N(v)$ is the visit count.
MCTS in Alpha Go
https://www.nature.com/articles/nature16961
Networks
2 policy networks
$P_\sigma (a|s)$ Supervised Learning policy network
- Input: Simple representation of the board state
- Output: Probability distribution over all legal movement
- Goal: Maximize the likelihood of the huaman move a selected in State s
$P_\pi (a|s)$ Reinforcemet Learning policy network
- Identical Structure as $P_\sigma$
- Goal: Maximize the expected outcome
1 value network
- $V_\theta(s) $ RL value network
- Input: State preresentation
- Output: outcome from the current position
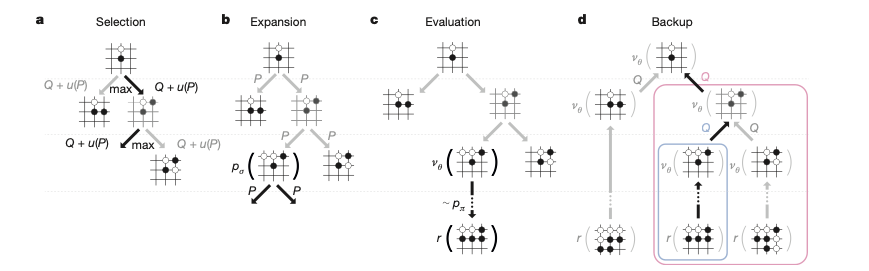
Searching Process
Selection:
Three Statistic Info on each node (s, a):
Visit count
Prior Probability, predicted by $p_\sigma(a|s)$
Action Value $Q(s,a)$: Average evaluation of all simulation passing through that each
Traversing the tree by selecting the edge with max mark, where mark is $$ Q + u(P) $$
Expansion:
- The expanded node will be processed by $P_\sigma $, generating the prior probability of each poential actions.
Evaluation:
- The Leaf node will be evaluated by two ways $$ V(S_L) = (1-\lambda)v_\theta(s_L) + \lambda z_L $$
- Evaluating the node by $V_\theta$
- Evaluating the node by continuing playing the game from the state $$S_L$$ (Same as before), while using $$P_\pi$$ to sample actions. At the end of the game, using an evaluation function.
Backup:
- Update the visit count and mean evaluation recursively.
MCTS in Alpha Go Zero
https://discovery.ucl.ac.uk/id/eprint/10045895/1/agz_unformatted_nature.pdf
Network
- One network $f(\theta)$ to replace the value evaluate net and policy net in the previous one
- Input:
- A sequence of representation of board position: raw board representation s of the position and its history
- Ouput:
- $Pr(a|s)$ Probability of each action, Vector
- $V(s,a)$ Evalution of current $(s,a)$, Scalar
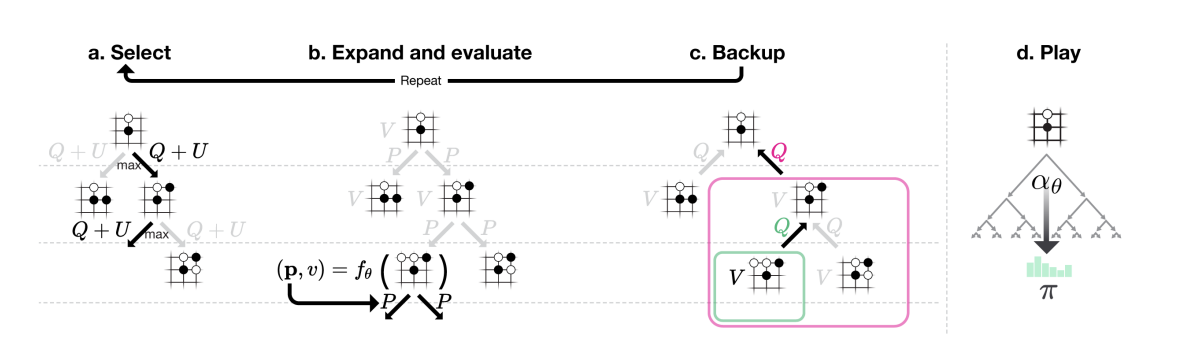
Searching Process
Selection:
- Same as before, where $$ U(s,a) \propto \frac{P(s,a)}{1+N(s,a)} $$
Expansion and Evaluation:
- Instead of continue exceuting the game, the evaluation of the expanded node is directly predicted by $f(\theta)$ , same for the prior probability
Evaluation:
- Action-values Q are updated to track the mean of all evaluations V in the subtree below that action
MCTS in MuZero
https://www.nature.com/articles/s41586-020-03051-4
- Without the simulator:
- No state transitions
- No Terminate states
- No actions restriction
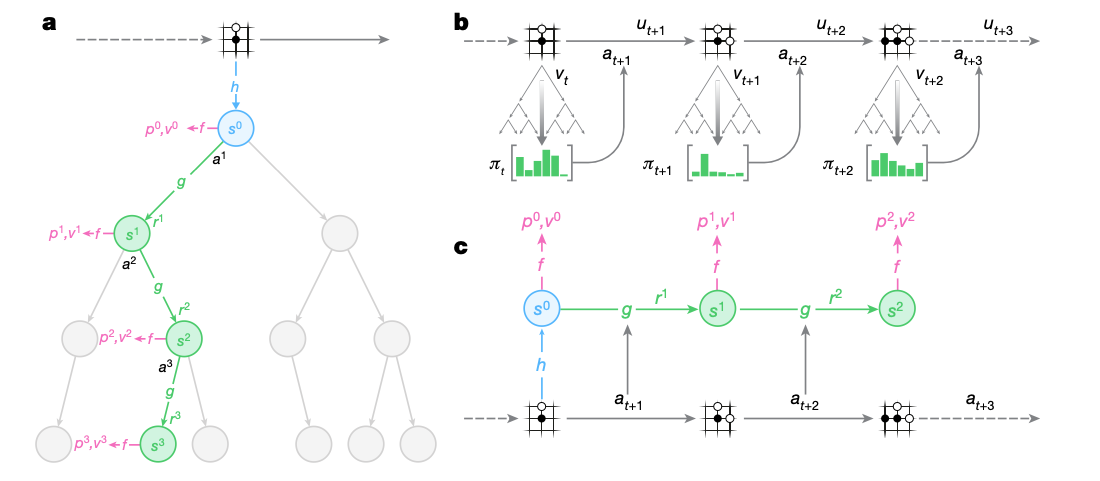
Networks
All parameters are trained jointly
Representation function h:
- Encoding the history over board states into the internal state $s$ $$ s = h_\theta(o_1,\cdots,o_t) $$
Perdiction function f :
- same architecture as AlphaZero
$$ p_k,v_k = f_{\theta}(s_k) $$
Dynamics function g:
- Mirror the structure of MDP, a recurrent process $$ r_k,s_k=g_{\theta}(s_{k-1},a_k) $$
Searching process
Observation Encoding by representation function $h(s)$
Selection:
Each node contains 5 statistic info:
- Visit count
- Policy
- Mean value
- Reward
- State transistion (Internal root state)
According to probabilistic upper confidence tree bound
Expansion:
- Create the new node
- Reward and state are from the dynamic function $r’,s’=g_{\theta}(s,a’)$
- Policy and Value are from predcition function $p’,v’=f_{\theta}(s’)$
- Mean value and visit cound are initialized as 0
Backup
MCTS in Sampled Alpha Zero
http://proceedings.mlr.press/v139/hubert21a/hubert21a.pdf